Dr.片山の100均ロボット研究室
長年の夢を実現! 100均で作る2足歩行ロボット

こんにちは。片山均(かたやま ひとし)です。愛媛県八幡浜市にある三瀬医院で院長を務めながら、100円ショップで見つけたグッズで作る低予算のロボットを研究しています。
長年の研究のなかでも、毛玉取り器を動力に使った2足歩行ロボットは大きなテーマのひとつです。私は研究初期からいくつもの2足歩行ロボットを作ってきました。
最も初期に作った2足歩行ロボットがこちら。
その後に作った、重心を左右に移動しながら歩くタイプ。

膝関節を付けてみたものです。
構造を見直してシンプルにしたもの。
こうして改めて見てみると、なかなかいい動きをしていますね。しかし、これらのロボットには致命的な弱点があります。それは再現性。同じものを作っても、うまく歩かないんです。
また、上記で紹介したロボットたちを引っ張り出してきて動かそうとしても、うまく動かず……。知らない間にバランスが微妙に狂ってしまっているのか、すぐに転んでしまうんです。
再現性がないものは成功とは言えない……。もっと安定した2足歩行ロボットは作れないものか。毎晩試行錯誤をしてきました。
そんなときに目にしたのが、Twitterでのパスコンパスさんのこの投稿でした。
軽量版の #M5PPwalker
— パスコンパス (@pscmps) July 19, 2022
新しい8servos hatで軽快に歩いててかわいい pic.twitter.com/dcRK5UchrT
きっちり重心を移動して軸足に載せているじゃありませんか! これなら毛玉取りで安定した2足歩行ロボットが作れるかも。そう思ってさっそくチャレンジしてみました。

安心/安定の2足歩行ロボットの製作過程
使用した材料は以下の通りです。
- 毛玉取り 1個
- 竹の箸 30本くらい
- ストロー 2本くらい
- 厚紙 適量
- タイルマット 適量
- 輪ゴム 3個
- 単3形乾電池(おもりとして)1本
製作過程はこちらです。
誰に何を言われようとも、これは今回制作するロボットのイメージ図です。この時点では8等身を想定していました。
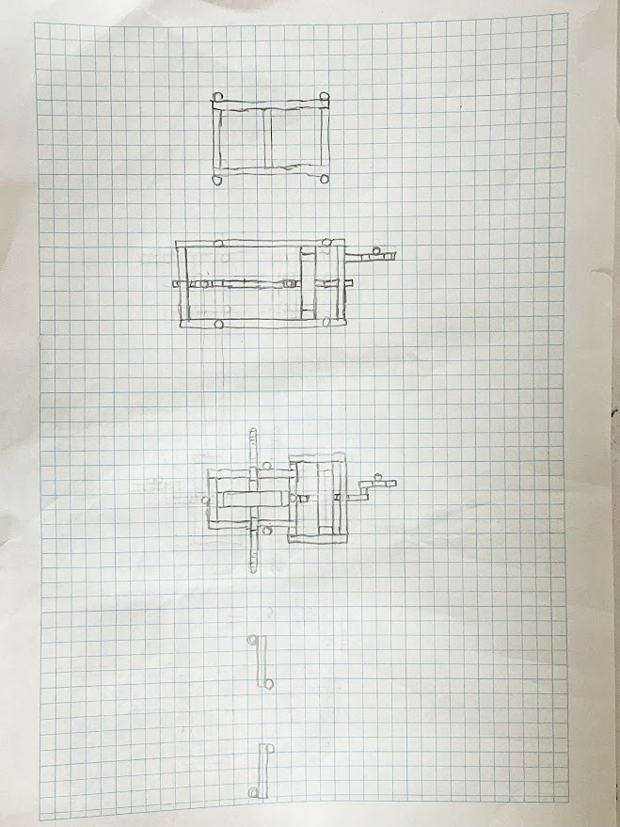
ロボット本体のざっとした設計図です。
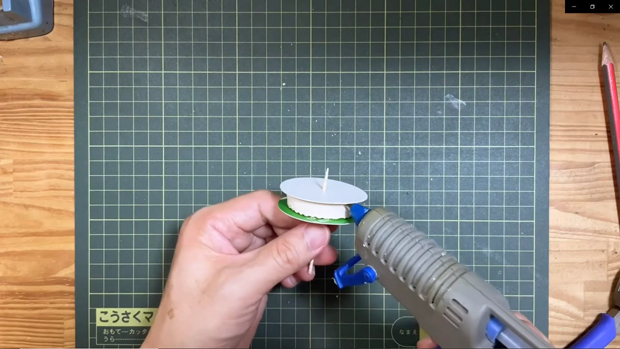
コンパスカッターで円形に切り出したタイルマットと厚紙を、グルーガンで接着してプーリーを3個作ります。
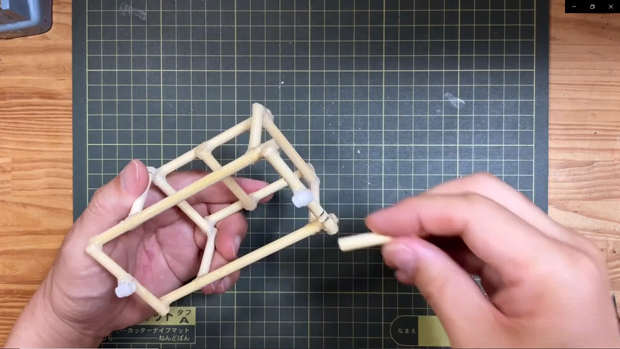
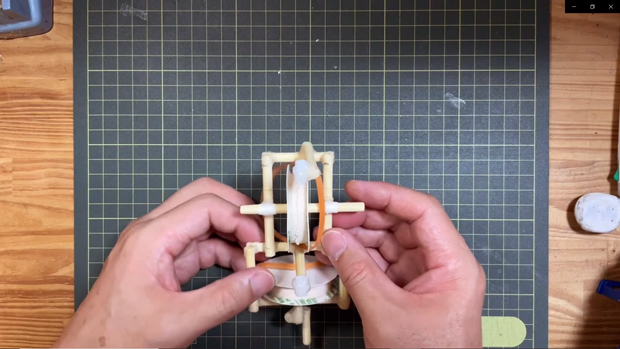
竹の箸とストローで、毛玉取り器を載せるやぐらの上部を作っていきます。
同様にやぐらの下部も作ります。
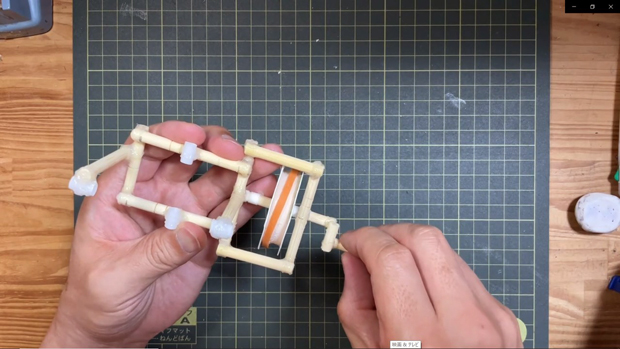
やぐらの下部に輪ゴムを掛けたプーリーを取り付けて、竹の箸でクランクを作っていきます。
やぐらの下部に輪ゴムを掛けたプーリーをもう1個取り付けます。
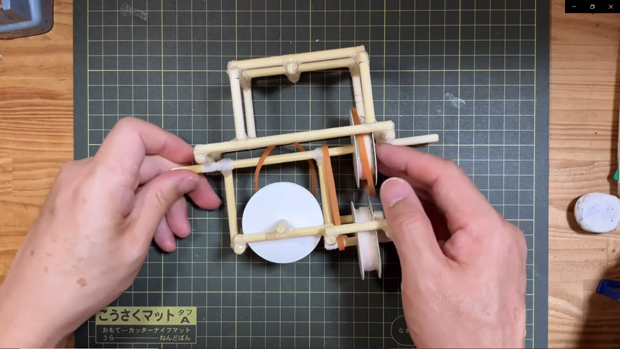
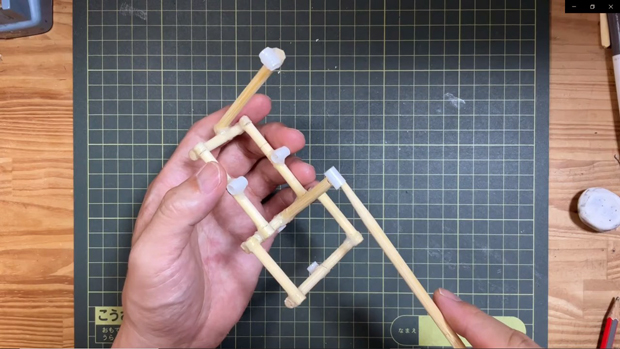
もう1個のプーリーを取り付けた竹の箸で、やぐらの上部と下部を接続します。
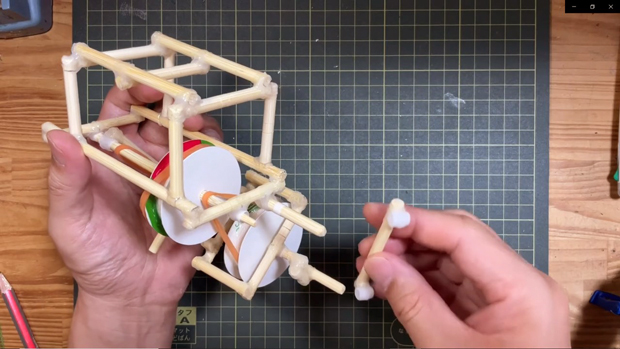
両端にストローを取り付けた箸でやぐら下部のクランクとやぐらの上部をつなぎます。
やぐら上部の揺動が大きくなりすぎないように、ストッパーを取り付けます。
やぐら上部はこのように動きます。
やぐらの下部に竹の箸を接着して、やぐら上部の揺動運動でやぐら全体がロッキングチェアのように揺動することを確認。かなりぎこちないですね。
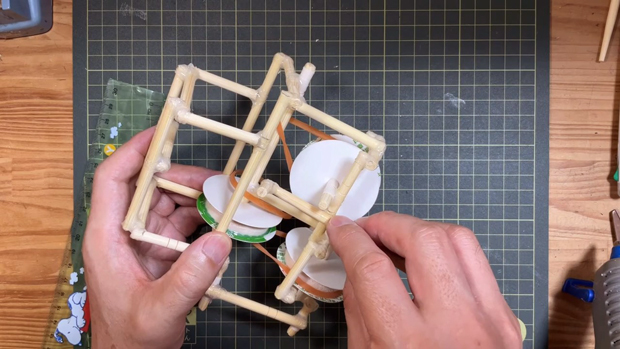
竹の箸と円形に切り出したタイルマットでできた脚を取り付けます。

つづいて脚とプーリーをストローのじゃばら部分でつなぎます。
あとはひたすらやぐらの下部に取り付ける竹の箸の位置や長さを変更して、転ばずに歩けるようになれば完成です。

竹の箸の調整だけではうまくいかなかったので、最終的におもりとして単3形乾電池をやぐらの下部に載せることで安定させました。
安定させるためのおもりが重要
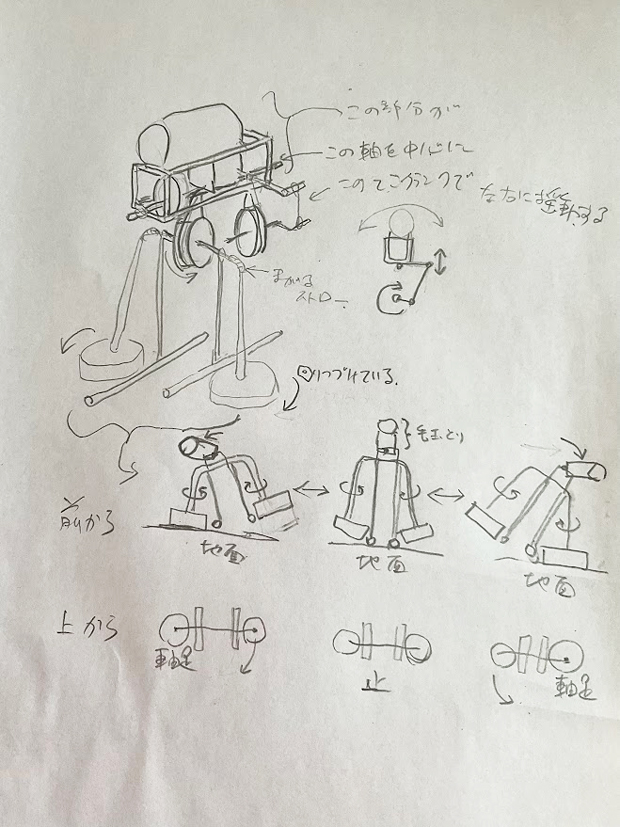
完成前に描いた図なので完成品とはいろいろ異なっていますが、歩く仕組みは上図の通りです。
てこクランク機構を介して冠状面方向の回転でやぐら上部を左右に揺動させます。その一方で、矢状面方向の回転がストローのじゃばらを介して両脚底を回転させます。接地している脚が、接地していない脚を前に移動させているうちに、やぐら上部が揺動することで重心が移動して軸足が切り替わります。この繰り返しで2足歩行を実現しています。
今回、歩行の大まかな仕組みは思いついたものの、脚の長さやタイルマットのサイズをどれくらいにすればいいのか分からないまま作り出したので、最初は転んでばかりでした。
結局単3形乾電池をおもりとして付け、ロボットの重心を下げることでうまく歩くことができました。それに気付くまでは倒れそうになる体をどのように支えればいいのかばかり考えて、ひたすら竹の箸をくっつけたりはずしたりを繰り返していました。
私の100均ロボットはグルーガンで接着しているので、気軽に調整できるのがいいところです。
脚を常時回転させながら胴体を左右に揺動させることで、コミカルに歩くロボットになりました。単3形乾電池のおもりのおかげでなんとか安定させることができました。
歩行の仕組みが分かりやすいので、同じものをもう1体作ろうとしたときも、今まで作った2足歩行ロボットよりは作りやすいかと思います。
なお、曲がるストローはあまり急な角度でなければ、ユニバーサルジョイントとして使えるので便利だと思います。
これで満足せず、これからも新しい機構の2足歩行ロボットを作っていきたいと思います。
第17回の研究発表は以上です。次回もお楽しみに!
企画・制作:片山均
取材・文:三浦一紀